wit - Czw 29 Kwi, 2010 Temat postu: ma ktoś jakieś dane o kątach czujników hala w róznych hubach Witam. mam kilka silników różnych firm... sushou bafang, jakiś direct 350W24V z napisem YZJL, oraz jakiś nieokreślonej firmy z przekładnią planetarną i wolnobiegiem -z budowy bardzo podobny do sushou... i problem ze sterownikami. dwa sterowniki -taki podłużny z kształtu jak batonik -czarny -firma nieznana -współpracuje ze wszystkimi tymi silnikami , podobnie sterownik 60-120 stopni e-crazyman -bez przestawiania kabelków. sterownik zakupiony w firmie "mohort" współpracuje z oboma nieznanymi silnikami tyle, ze do obu trzeba poprzestawiać kabelki halotronów i fazowe... i to do każdego silnika inaczej... natomiast z silnikami sushou współpracować nie chce... jaki kat czujników hala mają silniki sushou? a może ktoś ma jakieś tabele z danymi różnych silników i różnych sterowników???? lub dane - sterowniki jakich firm można łączyć z silnikami jakich innych firm? pozdrawiam. Witek. tomson - Czw 29 Kwi, 2010 witam kiedyś zrobiłem fotkę silnika niestety trochę pod kątem. 

Kąt mechaniczny pomiędzy czujnikami jest 60° a elektryczny to już niekoniecznie. Silnik moc nominalna 200W i 36V z przekładnia planetarną w kole 26" tomson - Nie 19 Wrz, 2010 Dorwałem silnik BLDC od jakiś maszyn. Silnik ma na PCB w środku 3 czujniki hala rozmieszczone jak widac na fotce 
silnik ma 8 biegunów magnetycznych i 12 zębów stojana. W ramach eksperymentu chciałbym go przerobić i zmienić wirnik na 10 biegunów magnetycznych co wiąże się z przezwojeniem stojana 
Silnik obecnie bezproblemowo współpracuje ze sterownikiem rowerowym z czujnikami hala jak i regulatorem bez czujnikowym.Co prawda co regulator to silnik ma rożne obroty Anonymous - Pon 20 Wrz, 2010 Wydaje mi się, że te 60-120 stopni to własnie stopnie elektryczne. W nocie MC33035 podają następujący sposób przeliczania: stopnie elektryczne = stopnie mechaniczne (ilość biegunów/2) A swoją drogą ostatnie kilka dni dręczy mnie to zagadnienie i wychodzi, ze za krótki jestem, żeby je objąć. W altku jest 36 zębów i 6 par biegunów. Więc na jeden cykl, tj. 360st. wychodzi 6 zębów. Rozmieściłem czujniki co drugi ząb, co w moim przekonaniu powinno odpowiadać 120st. Tylko pytanie czy dobrze kombinuję... tomson - Pon 20 Wrz, 2010 ja podłączyłem sobie 3 diody LED pod wyjścia czujników. Przy przekręcaniu wałem silnika zapala się 1 dioda potem 1 i 2 potem 2 potem 2 i 3 potem 3 i tak się powtarza.Muszę sprawdzić jak ma się ten kąt przy obrocie wału do rozmieszczenia magnesów i zapalania kolejnej diody sprawdź może u siebie a ja sprawdzę w tym silniku jaki jest to kąt przy zmianie palenia się diod.Przy aplikacji MC33035 jest chyba jakaś tabelka ze stanami logicznymi przy różnych kątach wału. Anonymous - Pon 20 Wrz, 2010 Teraz tego nie sprawdzę, bo na razie mam wlutowane hallotrony z CD-ROMu, a to błąd, bo one produkują sygnał analogowy, wymagający przetworzenia do współpracy z MC i do takiego testu o jakim mówisz. Jutro kupię jakieś standardowe z wyjściem cyfrowym to się pobawię. tomson - Śro 22 Wrz, 2010 Tak wychodzi że te stopnie elektryczne wychodzą różnie do ilości biegunów magnetycznych w stosunku do kątów mechanicznych. I tak przy silniku co ma 14 biegunów magnetycznych jest chyba tak ze 360° elektrycznych jest pomiędzy kolejnymi biegunami o tej samej biegunowości. A na mechaniczne to się tak przekłada że 360° elektrycznych podzielonych przez 7 par biegunów to wychodzi 51,42° stopnia mechanicznego i to teraz dzielimy przez 3 i wychodzi ze 120° elektrycznych to się równa 17,14° mechanicznego tak przynajmniej zrozumiałem to co piszą na endless-sphere.com tomson - Czw 23 Wrz, 2010 Zamocowałem czujniki na silniku jak widać na załączonej fotce 
Wyszło ze 120° elektrycznych = 30° mechanicznych. Silnik ma 12 zębów na stojanie czyli wychodzi szczelina co 30°. Wirnik ma 8 biegunów magnetycznych. Czujniki jakie użyłem to TLE4935 (bipolarne) Magnes wirnika jest szerszy od blach stojana tak akurat o wysokość czujników hala. Podłączyłem pod regulator rowerowy od E-Crazyman. Silnik ma nominalne napięcie 340v DC a ja go zasilałem z 48V. Przy okazji sprawdziłem czy w regulatorze działa wsteczny (zwarcie pinu -X3 do GND) i działa O.K Standardowo do tyłu jest chyba 30% wartości regulacji jak do przodu Anonymous - Pią 24 Wrz, 2010 No i fajnie, że działa. Też kupiłem te czujniki, ale dla mnie to niedobrze, łatwiej w altku umieścić unipolarne, jednak takich w wioskowym sklepie na składzie nie mieli. Żeby bipolarne prawidłowo działały musiałbym je upchnąć w wyżłobienia stojana i przy takiej próbie dobrego ułożenia udało mi się spalić czujnik, więc nadal jestem z próbami uziemiony. Faktycznie w kilku klasycznych silniczkach BLDC, które rozbierałem rozmieszczenie halla było takie jak u Tomsona, czyli między wypustkami statora. W altku to nie wygląda niestety tak prosto - stojan ma 36 zębów, nawiniętych tak, że cewka jednej fazy obejmuje 3 zęby a na każdym zębie jest początek kolejnej cewki (ktoś coś z tego rozumie? Fotka poglądowa: 
tomson - Pią 24 Wrz, 2010 Magnes powinien wystawać poza blachy stojana tak jest we wszystkich silnikach praktycznie i nie musisz wpychać czujników pomiędzy blachy stojana. Ja w silniku crystalyte 4012 mam na wirniku 16 biegunów magnetycznych i wypełnienie magnesami jest praktycznie 100% a stojan ma 48złóbków i uzwojenie jest podobnie nawijane tez przez 3 zęby.Niestety nie mam fotki na którym dobrze widać umiejscowienie czujników. Podłączałem generatory 3F przerobione od silnika z pralek pod sterownik bezczujnikowy i bezproblemowo one pracują a mają uzwojenie nawijane ze boki jednej cewki są w 1 i 4 żłobku stojana tak jak w altku. Spróbuję nawinąć silnik z 48 złobkami w ten sposób 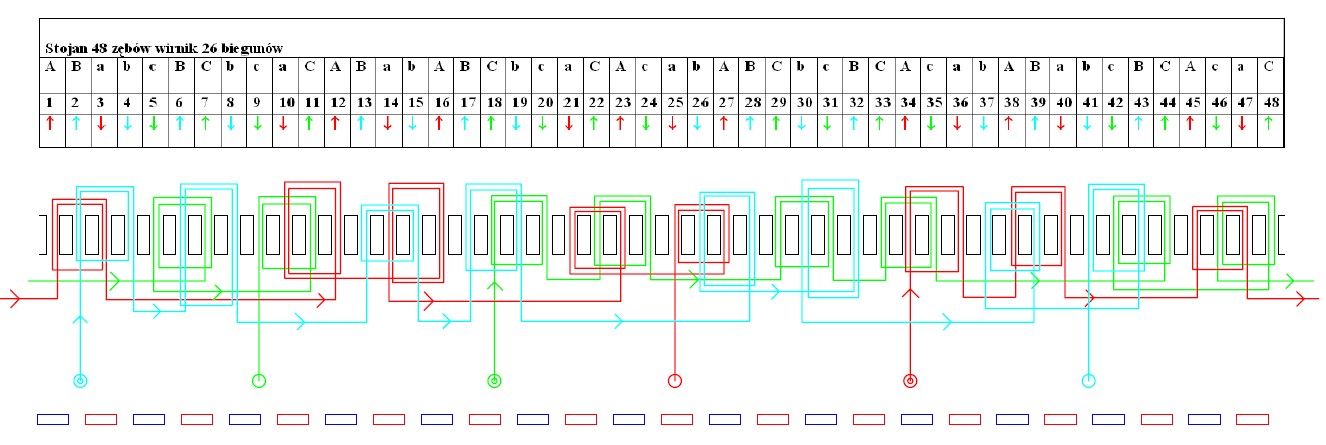
pokazane są kierunki nawijania drutu w poszczególnych żłobkach Przy nawinięciu uzwojenia klasycznie na 16 biegunów boki cewki jednej fazy są nawijane co 4 żłobek czyli początek pierwszej cewki strzałka do góry potem w czwartym w dół potem przeskok do siódmego żłobka do góry. zobacz sobie na kalkulatorze http://www.powercroco.de/Kombinationstabelle.html 48zębów stojana i 16 biegunów i porównaj do tabelki . Litery duże i małe to przeciwne kierunki nawijania. |
||||||
